私たちの提案した手法は、図1-1に示すように、追跡器と検出器から構成されています。 図中の追跡器では、オプティカルフローに基づいて格子点の追跡を行い、 その結果を検出器に送ります。検出器では、テクスチャ情報に基づいて格子点検出を実施し、 追跡器から送られてきた結果との比較を行うことで累積追跡誤差を逐次的に低減します。

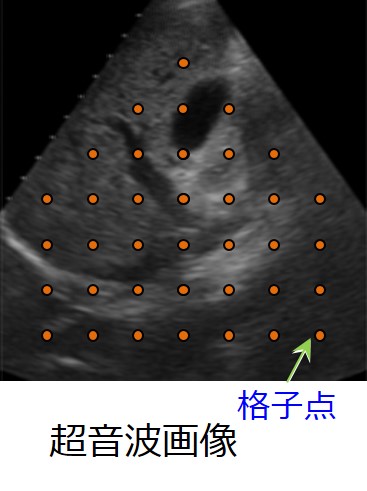
図1-2は、腹部超音波画像に格子点を設定した例を示しています。
オプティカルフローの計算には、大域的最適化に基づくFahrnback法を用いており、
格子点位置の画素を含め、画像全域の各点でのフローが求められます。
しかし、フロー計算は各画素の時間的/空間的な輝度変化に基づいて行われ、
画素間の変位関係は考慮されていません。そのため、
超音波画像のように雑音が多く含まれる場合には長時間に亘って安定に追跡することは
困難です。そこで、提案手法では、図1-2に示すように画像上に仮想的な格子を考え、
隣接する格子点同士をばねで連結したモデルを導入しました。
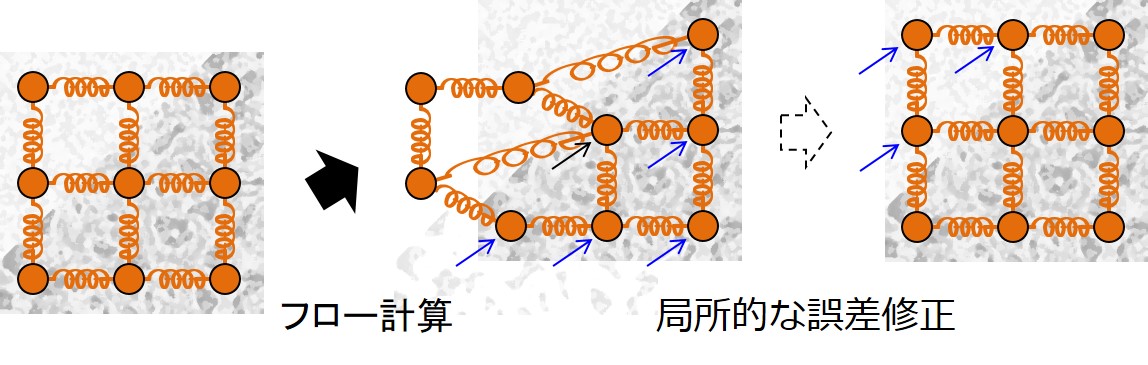
ばねによって隣接格子点間が連結されているため、
各格子点には、移動量に応じてばねからの応力が働きます。
このばねの力によって、フロー計算のみでは追跡困難な格子点の位置補正が可能となります。
その概念を表したのが図1-3です。
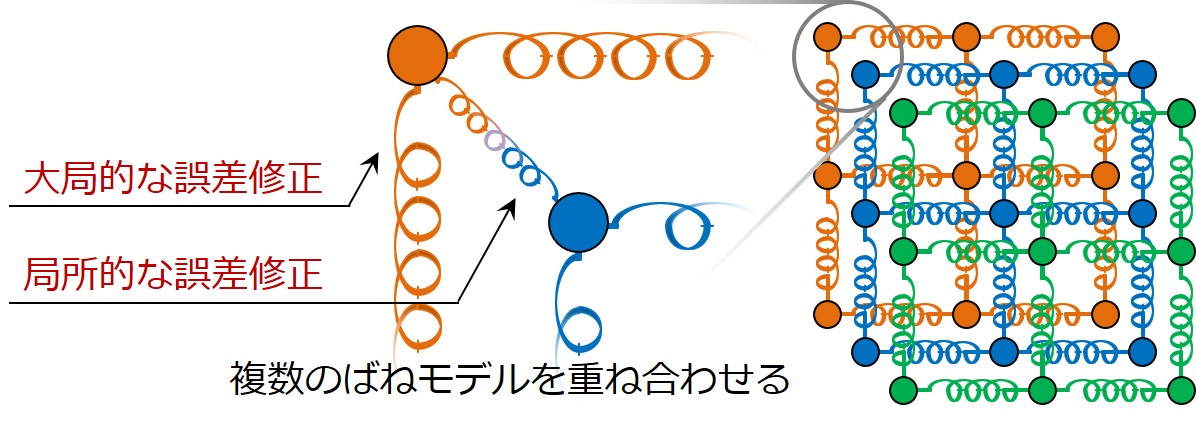
単一のばねモデルでは、格子点を多く設定すればする程、格子点間の距離が短くなり、 格子点変位の誤差修正は局所的となります。 そこで、より広い範囲での誤差修正を可能にするために、ばねモデルを多重化し、 各ばねモデル間を連結することによって広範囲での誤差修正を可能にしました。 それが、図1-4の多重化ばねモデルです。
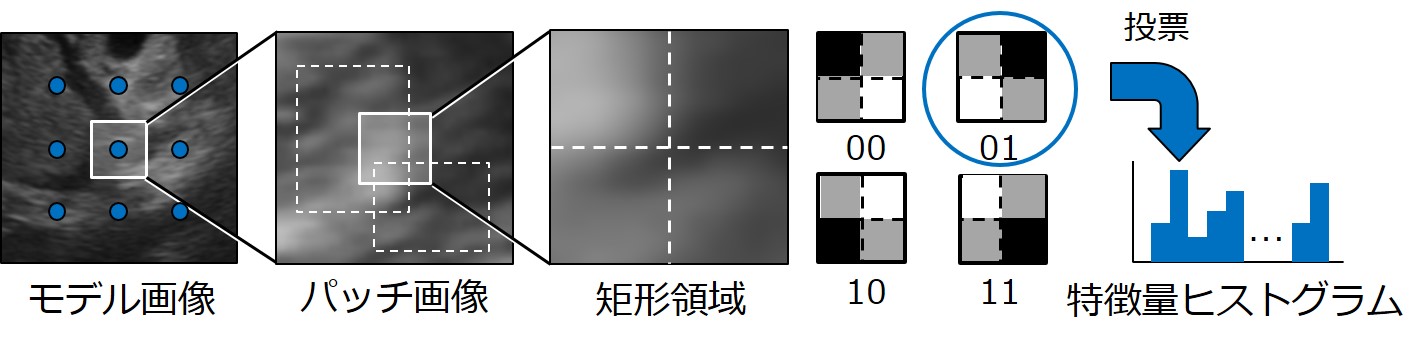
次に検出器について述べます。 検出対象は、予め決められた格子点です。 格子点検出には格子点周りの矩形領域のテクスチャ情報を用います。 テクスチャ特徴としては、超音波画像に特有なスペックル性雑音に対して頑強な 特徴表現を用いました。その概念を示しているのが図1-5です。 この方法は、2-bitバイナリ特徴表現法と呼ばれる方法です。 まず、画像上の決められた位置に配置したそれぞれの初期格子点の特徴表現を行います。 各格子点を中心に一定の大きさを持つ領域(パッチ画像)を定め、 その中にサイズの異なる複数の矩形域を設定します。 それぞれの矩形域を上下に2分割し、分割後の2つの領域の平均濃度の大小に応じて、 0もしくは1の符号を割り当てます。 (例えば、上領域の平均濃度が下領域の平均濃度よりも高ければ1、そうでなければ0とする) これと同じことを左右方向の2分割に対しても行うことで、 1つの矩形域から2-bit長のbinary符号を得ます。 格子点周りの領域内でN個の矩形域を考えると、 合計で(N x 2)-bit長のbinary表現を得ることができます。 ここで言う格子点とは1つのクラスであり、格子の交わる点を含む小領域で表されます。 すなわち、小領域内の複数の画素点で表されます。 この小領域内の各点に対する2N-bitのbinary特徴表現を、 2の(2N)べき乗個の箱を持つ度数表(ヒストグラム)に投票することで、 当該格子点のテクスチャ特徴表現を得ます。 Nの数が大きい場合、特徴表現のビット長が長くなるため、全体を複数のブロックに 分割します(Fernsモデル表現)。同時に雑音や格子点移動の不規則性等を考慮し、 各ブロック毎のbinary表現のビット誤りパターンを同じ度数表に重畳します。 このようにして各格子点毎に作成された度数表を、 検出器における格子点の確率的検出モデルとして用います。
検出器は、追跡器で推定された格子点の変位累積誤差を低減させる役割を担っています。 ただし、モデルに対する尤度の低い検出点は、追跡点の位置修正効果が期待できません。 そこで、提案手法では検出点の尤度の大きさに応じて動的に追跡点の誤差修正を実施しました。
| 表記 | 手法の内容 |
|---|---|
| Opt | オプティカルフロー追跡器 |
| Opt_MS | 多重ばねモデル付き追跡器 |
| Opt_MS+D | Opt_MS+検出器 |
| Opt_MS+D_DC | Opt_MS+動的修正あり検出器 |
![]()
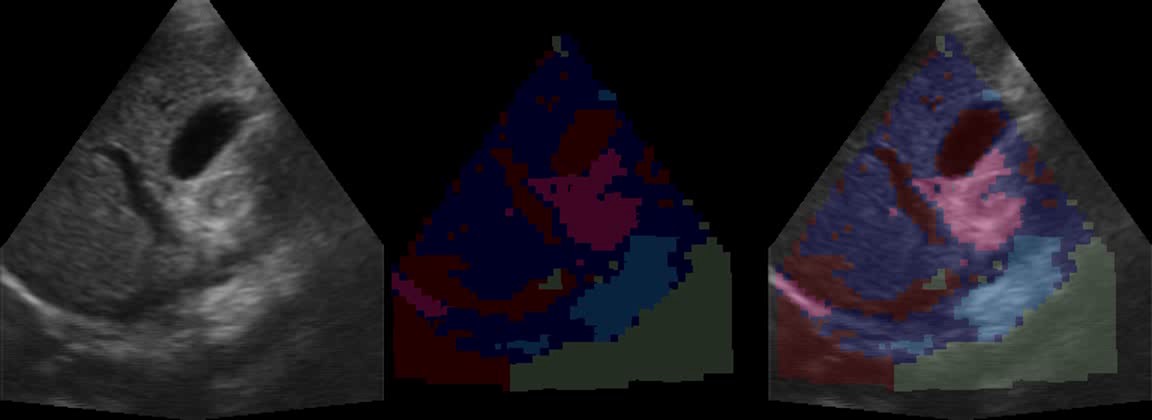
シミュレーション実験より、 提案法は超音波画像の動態解析を行う方法として有効であることを確認しました。 画像内の各点の変位量に基づいて超音波画像の分割を行った例が図1-7です。 図中中央の画像が分割領域を表し、右図が各領域を左画像に重畳した結果を示しています。
参考資料
- 横山諒,青木工太,長橋宏、”超音波画像における動態の長時間解析”, 第33回日本医用画像工学会大会予稿集CD-ROM, OP2-2 (2014)
- Ryo Yokoyama, Kota Aoki and Hiroshi Nagahashi, "Dense motion analysis and segmentation of ultrasound images", Proc. SPIE 9316, Multimodal Biomedical Imaging X, Vol.9316 03 (2015)